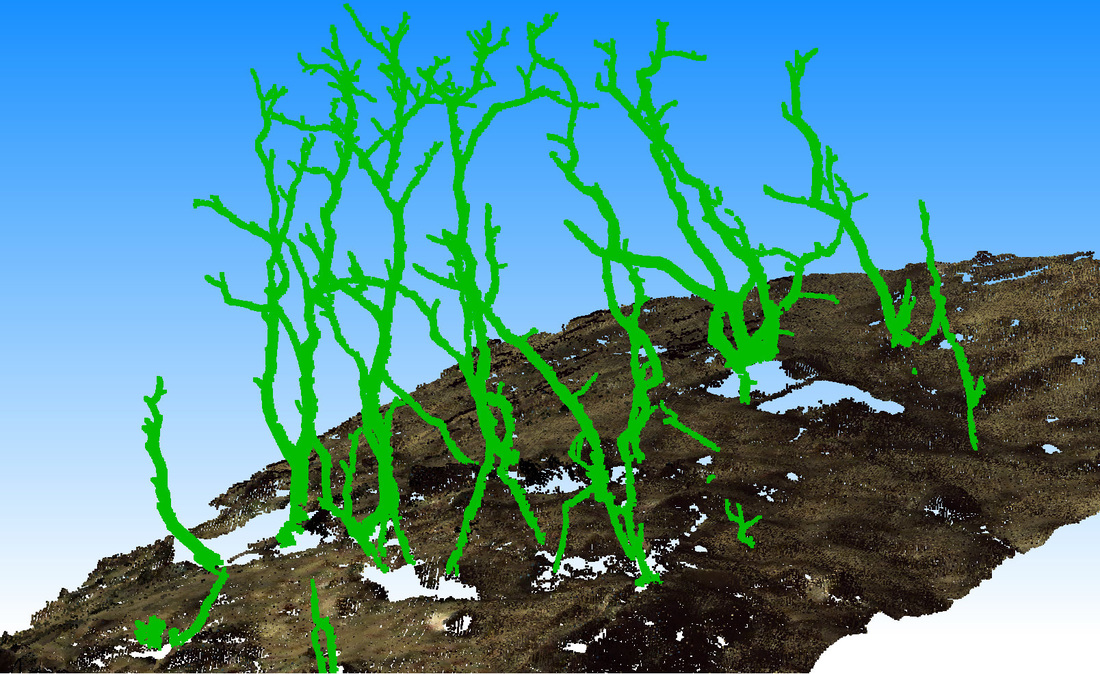
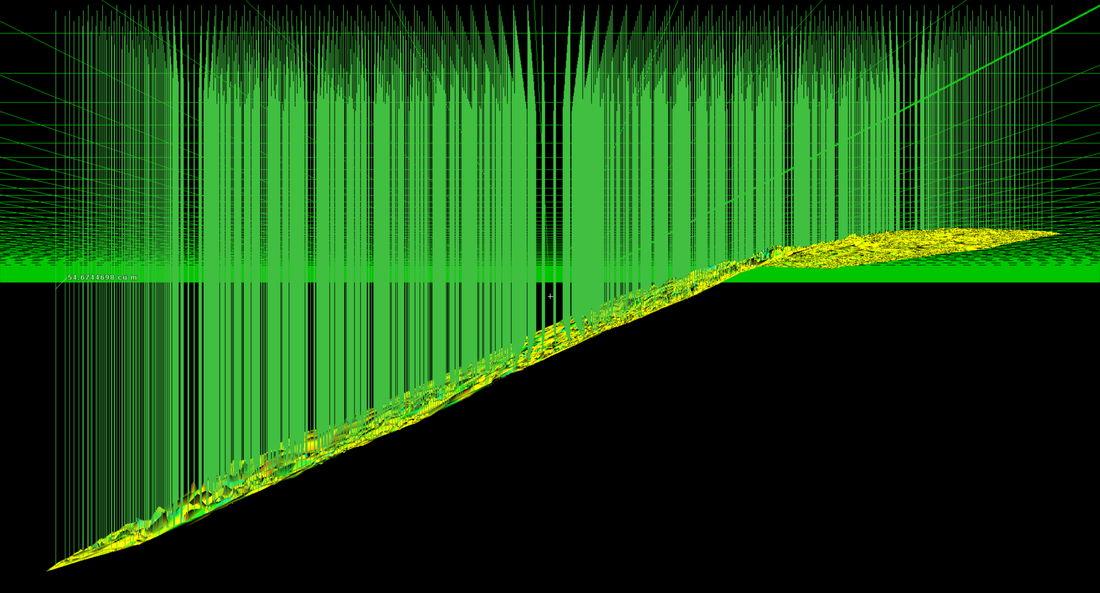
Segmented terrain (brown) and vegetation (green)
A basic premise for all laser scanners (and remote sensing techniques in general) is that they remotely sense, capturing objects within their field of view. However, not everything which is located within a scanners field of view is useful, and in most instances extraneous data has a negative impact on the quality of the collected data. This is something that some leading laser scanning industry voices are beginning to notice as the next big hurtle for laser scanning to overcome, that is making a laser scanner only collect what you need, not everything within the scanners field of view.
However, for now we must remove unwanted data and this requires filtering to identify, classify and separate the wanted and unwanted data. Although there are a myriad of filtering methods, the following paragraphs will detail three, relatively simple methods of filtering data from terrestrial laser scanner point clouds.
However, for now we must remove unwanted data and this requires filtering to identify, classify and separate the wanted and unwanted data. Although there are a myriad of filtering methods, the following paragraphs will detail three, relatively simple methods of filtering data from terrestrial laser scanner point clouds.
Limit box
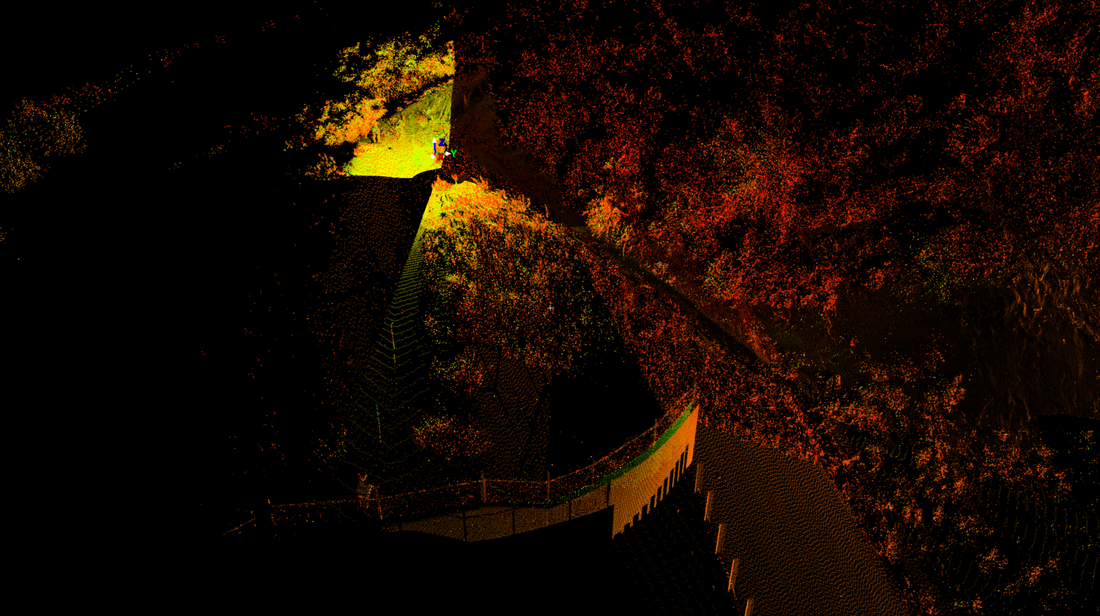
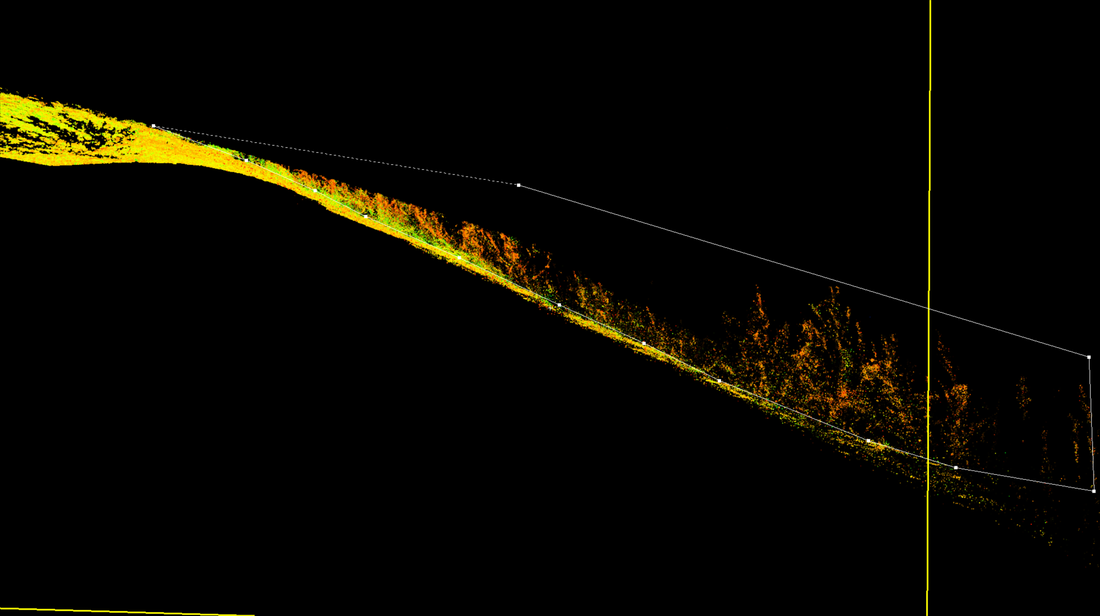
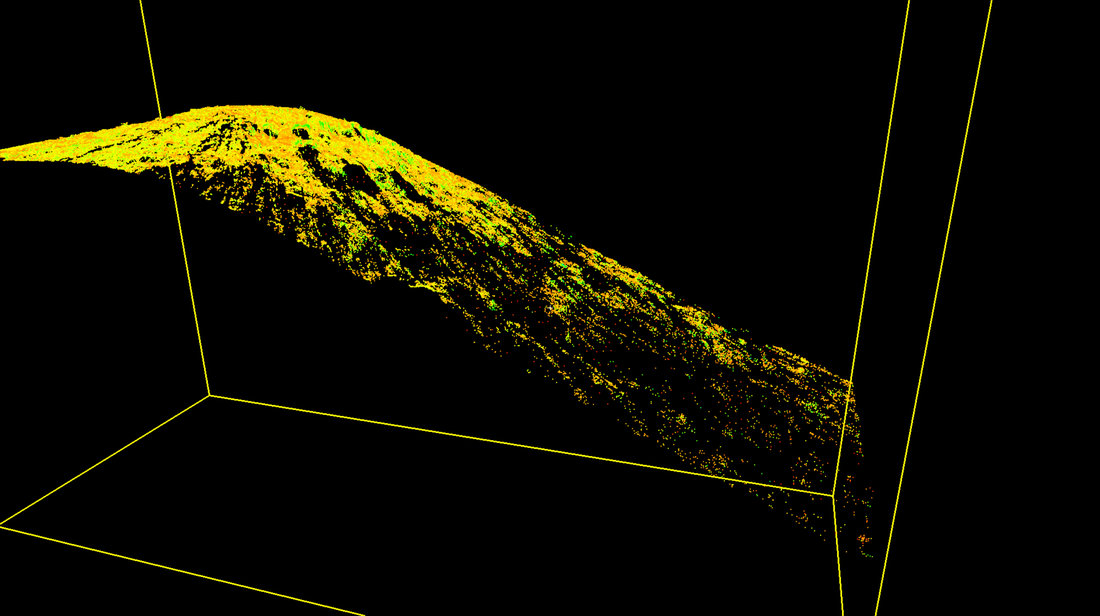
In the simplest terms a limit box is a 3-Dimensional box which temporarily segments a point cloud, 3-D model or mesh. Limit boxes allow a user to view only a section of the data, minimizing the confusion of data behind or around an area of interest. In many situations using a limit box is mandatory because of the complex geometry of the point cloud. A debris basin survey from November, 2010, provides an excellent example of when it is mandatory to use a limit box.

Debris Basin vegetation
Many of the debris basins have significant vegetation re-growth, which necessitates manual vegetation filtering. Without a limit box, the resulting mesh (from which volume measurements are made) is less accurate because clipping vegetation would remove bare surface points which lie behind vegetation (regardless of your perspective) requiring either leaving the vegetation untouched or deleting the vegetation along with bare earth points. Both these options were not suitable for the debris basin scans because the volumes derived needed to be quite accurate as they factor into evacuation plans for neighborhoods down slope from the debris basins.
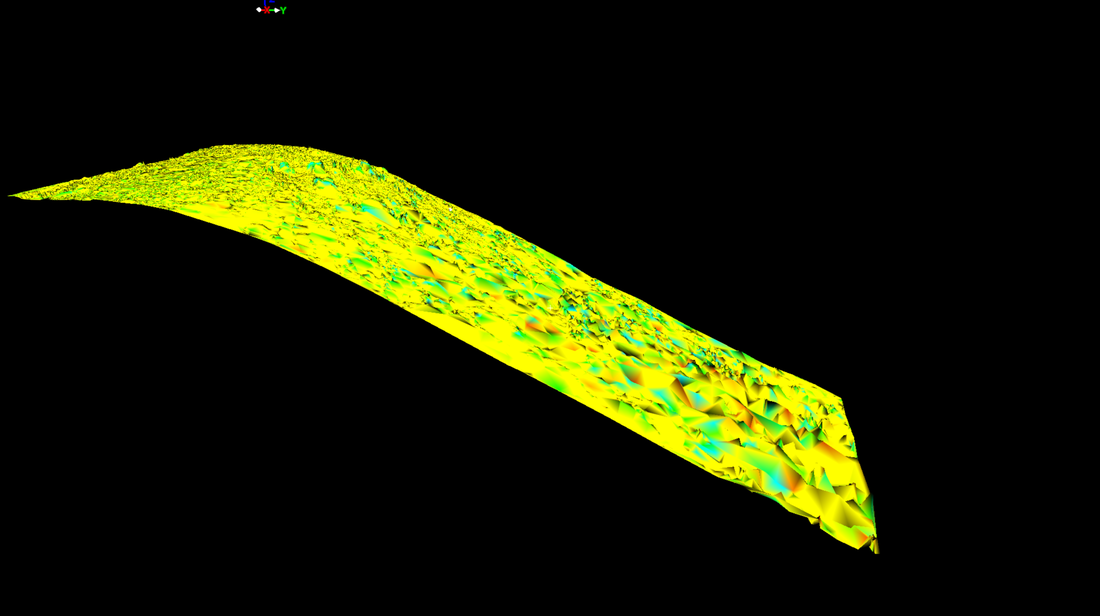
The top row of pictures from left to right: debris basin scan; a test section for filtering; a mesh (TIN) of the original point cloud. The bottom row shows: clipping vegetation with the help of a limit box; surface free of vegetation; bare earth mesh. The limit box is in yellow and the clipping fence is shown in white.
Of course this example is only on a small section of the entire data set, so you must repea this methodology to provide systematic vegetation removal across the entire basin.
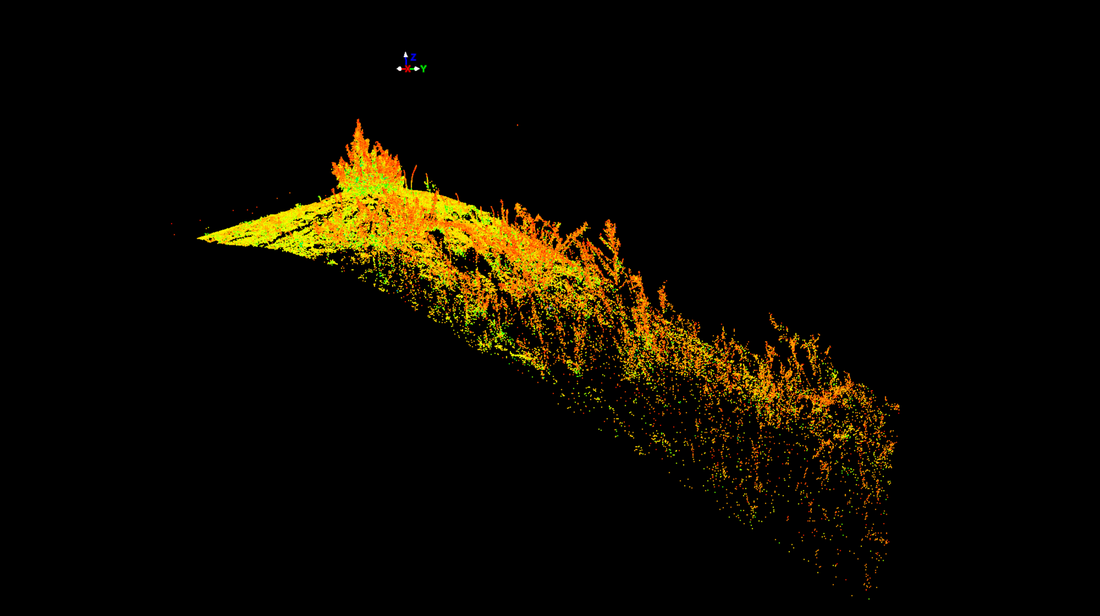
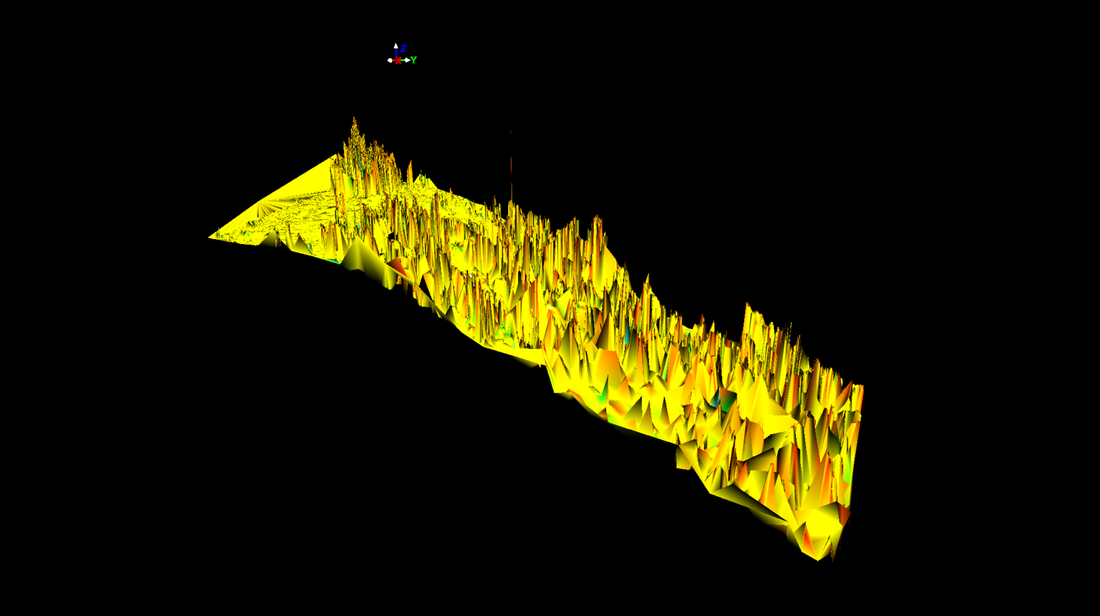
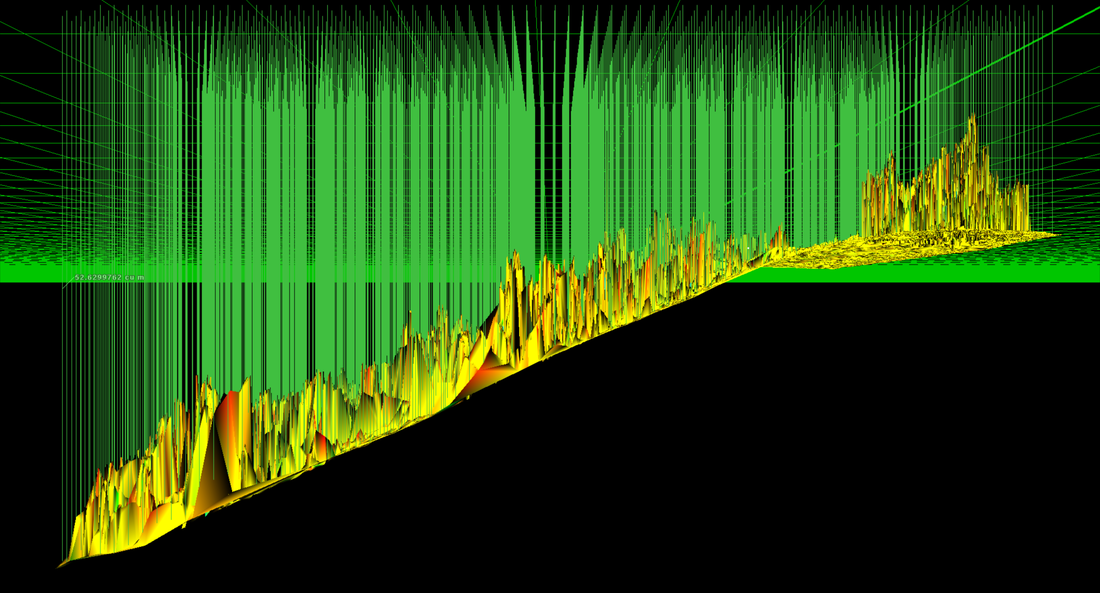
Just as a proof of concept for the debris basin methodology, shown below are the volume measurements (100 measurements per square meter) made from a common plane to the two meshed surfaces. The vegetated mesh (left) resulted in a volume of 52.62 meters^2, while the filtered mesh volume was estimated to be 54.67 meters^2. As expected the filtered mesh volume is greater.
Just as a proof of concept for the debris basin methodology, shown below are the volume measurements (100 measurements per square meter) made from a common plane to the two meshed surfaces. The vegetated mesh (left) resulted in a volume of 52.62 meters^2, while the filtered mesh volume was estimated to be 54.67 meters^2. As expected the filtered mesh volume is greater.
Point spacing
3dReshaper filters point clouds by looking for areas of similar point densities. Here, the single registered point cloud was divided into five. The divisions are developed where point spacing is greater than 0.055 meters. By dividing the cloud into areas of similar densities the accuracy of the meshing function can be refined by allowing greater control over the point spacing input within 3dReshaper. If a wide range of point spacings exist within the same point cloud then the meshing function will mesh according to the average point spacing, smoothing areas of high point densities while areas of lower point densities will be left un-meshed (i.e. holes).


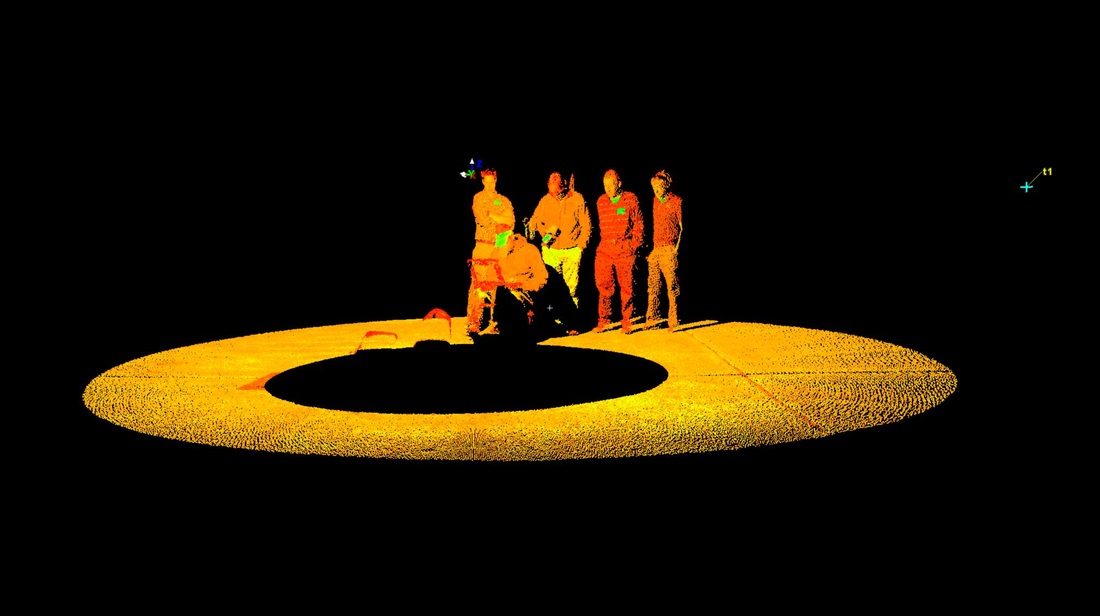
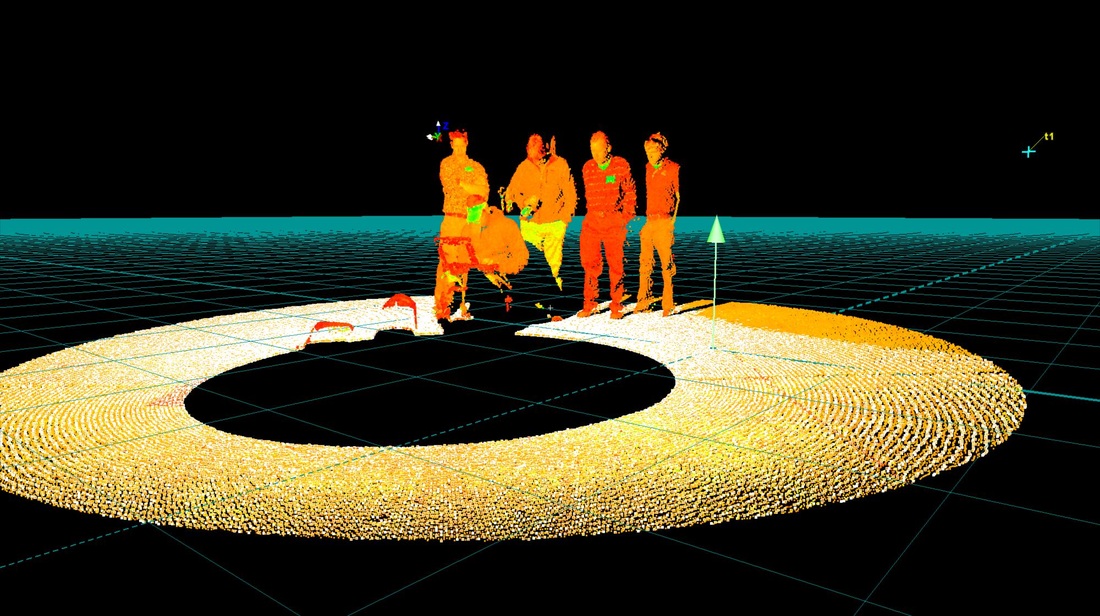
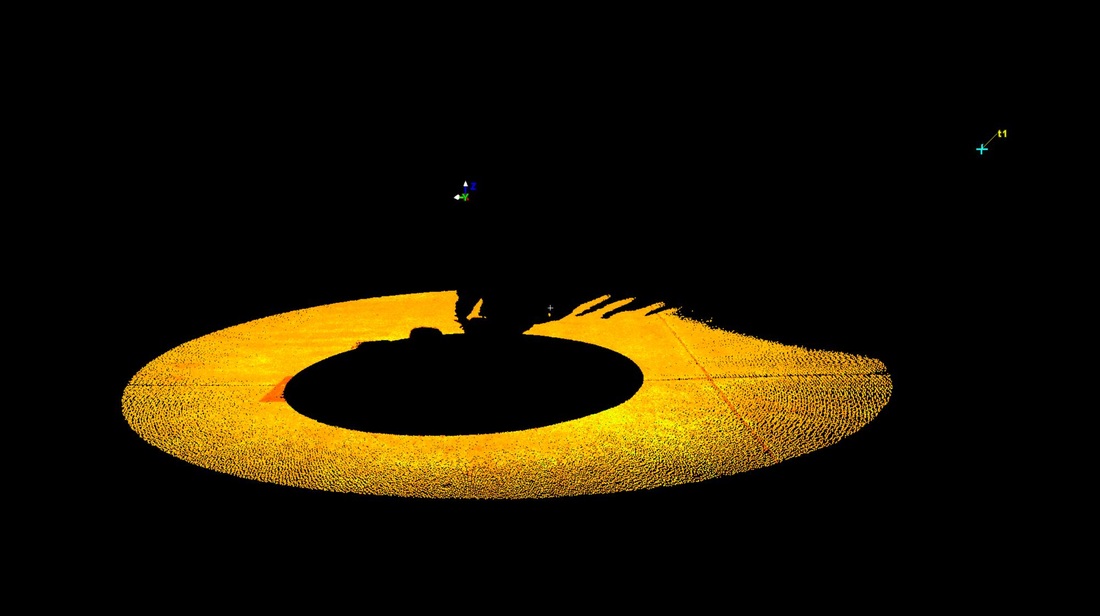
Regional Similarities
When scanning outdoor built environments, capturing people in scans present a constant issue, especially if the point cloud will be used for visualization. On planar surfaces, people (or any unwanted objects) can be removed by segmenting the cloud via offset from a plane. Here the ground slightly slopes to a drain in the bottom left corner so this method isn't perfect (note the non-highlighted section in the top right, center picture) but it does provide a clean and efficient solution for removing unwanted point cloud data.
Discussion
Although these methods are simple, its important to understand the basics of filtering point clouds because it allows you as the scanner operator to better design your scanning geometry based on what you know can be filtered and the desired result of the scan survey.
One recent and interesting development for filtering point clouds was the release of edgewise filtering software by clearedge3d. This software is the first of its kind and can automatically detect objects (pipes, walls) and ground surfaces within a point cloud. The advanced ground finding function in particular seems unbelievable, but technically it only uses the same methods that I have detailed above. After-all, a point cloud is really only x,y,z coordinates.
One recent and interesting development for filtering point clouds was the release of edgewise filtering software by clearedge3d. This software is the first of its kind and can automatically detect objects (pipes, walls) and ground surfaces within a point cloud. The advanced ground finding function in particular seems unbelievable, but technically it only uses the same methods that I have detailed above. After-all, a point cloud is really only x,y,z coordinates.
This material is based upon work supported by the National Science Foundation (NSF) under Grant No. 0934131, entitled “Geomorphic Connectivity in a Recently Burned Watershed” - Thad Wasklewicz, PI
This work is also based upon work supported by a Cooperative Agreement with U.S. Geological Survey Landslide Hazards Program entitled "Close-Range Photogrammetry and Terrestrial Laser Scanning Data and Analysis" - Thad Wasklewicz, PI

